Schaukeln tut es, wie ein Pferd sieht es nicht aus und ,,Affenschaukelstuhl`` finde ich auch nicht nahe liegend.
So ähnliche Geräte finden sich auf vielfältigen Darstellungen im Internet. Dies ist eine Machbarkeitsstudie, ob sich so ein Teil mit Heimwerkermethoden bauen lässt:
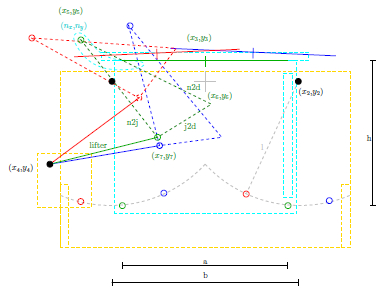
Eigentlich sieht die Konstruktion recht einfach aus, das Problem ist wohl, die passende Geometrie der Aufhängungen und Mechaniken zu finden. Daher habe ich mit einer Simulation des Teils angefangen:
|
package RockingChair "" model chair parameter Real a=400 "lenght of saddle"; parameter Real b=450 "distance of bearings"; parameter Real h=345 "height of saddle"; parameter Real l=300 "pendelum length"; parameter Real nx=-300 "horizontal position of neck bearing, rel. to saddle"; parameter Real ny=50 "vertical position of neck bearing, rel. to saddle"; parameter Real amplitude=100; // assume origin in the middle betwee the bearing points Real x1(start=-a/2); Real x2(start=+a/2); Real y1(start=-sqrt(l^2 - (b - a)^2/4)); Real y2(start=-sqrt(l^2 - (b - a)^2/4)); Real x3 "center of saddle"; Real y3 "center of saddle"; Real x5 "position of neck bearing"; Real y5 "position of neck bearing"; Real beta; Real betaDeg "inclination of saddle"; Real psi "direction of horn bearing relative to saddle"; protected parameter Real pi2deg=360/(2*3.14159); equation // points of saddle bearings (-b/2 - x1)^2 + y1^2 = l^2; (+b/2 - x2)^2 + y2^2 = l^2; // restriction (x2 - x1)^2 + (y2 - y1)^2 = a^2; // actuation x1 = -a/2 + amplitude*sin(2*3.14159/100*time); // middle position of saddle tan(beta) = (y1 - y2)/(x1 - x2); betaDeg = beta*pi2deg; (x3 - x1)^2 + (y3 - y1)^2 = (a/2)^2 + h^2; (x3 - x2)^2 + (y3 - y2)^2 = (a/2)^2 + h^2; // position of neck tan(psi) = ny/nx; x5 = x3 - sqrt(nx^2 + ny^2)*cos(beta - psi); y5 = y3 + sqrt(nx^2 + ny^2)*sin(beta - psi); end chair; model chairWithDildo extends chair; // assume origin in the middle betwee the bearing points parameter Real x4=-380 "horizontal position of lifter bearing"; parameter Real y4=-175 "vertical position of lifter bearing"; parameter Real lifter=270 "length of lifter"; parameter Real n2d=350 "distance neck to dildo"; parameter Real n2j=300 "distance neck to joint"; parameter Real j2d=150 "distance joint to dildo"; Real x6 "foot point of dildo"; Real y6 "foot point of dildo"; Real x7 "connection point of lifter and arm"; Real y7 "connection point of lifter and arm"; //Real gamma; //Real gammaDeg "inclination of dildo"; Real penetration "of dildo"; Real displacement "dildo relative to saddle"; equation // position of joint (x5 - x7)^2 + (y5 - y7)^2 = n2j^2; (x4 - x7)^2 + (y4 - y7)^2 = lifter^2; // position of dildo (x5 - x6)^2 + (y5 - y6)^2 = n2d^2; (x7 - x6)^2 + (y7 - y6)^2 = j2d^2; penetration = y3 + y6; displacement = x3 - x6; end chairWithDildo; end RockingChair;
Diese Simulation kann z.B. mit OpenModelica laufen gelassen werden.
Um auszuprobieren, ob das tatsächlich funktioniert, habe ich 20 mm dickes Sperrholz genommen und daraus Seitenplatten analog zur Skizze 6.53 geschnitten. Wenn der Sattel 500 mm lang und 450 mm breit werden soll, kann man das Stativ mit eine Innenbreite von 390 mm, und das Unterteil vom Sattel mit einer Außenbreite von 300 mm bauen, so bleibt Platz für die Pendellager. Die 300 mm langen Pendel habe ich einfach jeweils aus einem Stück Edelstahlkette und zwei geschweiften Schäkeln gebaut.
Tipp: Es empfiehlt sich, eine ungerade Anzahl von Kettengliedern zu verwenden.
Tipp: Falls der Bolzen der Schäkel nicht leicht durch die Kettenglieder geschoben werden kann, kann man diese stauchen, indem man sie mit einer Zange senkrecht auf einen Amboss (am Schraubstock, oder schwerer Hammer) stellt und mit einem mittelschweren Hammer draufschlägt.
Die Schäkel lassen sich über die Kugellager schieben, die auf Bolzen M8 sitzen. Damit die Lager nicht abrutschen habe ich sie mit einer Karosseriescheibe und einer selbstsichernden Mutter befestigt. Eventuell muss man zwischen Holz und Kugellager noch 1 oder 2 Unterlegscheiben legen, damit die Schäkel nicht am Holz scheuern. Gemäß Berechnung müssen die Bolzen der Lager in den Seiten des Stativs
in Abb.: 6.53 450 mm auseinander und ca. 25 mm vom oberen Rand und in den Seiten des Sattels 400 mm auseinander und ca. 25 mm vom unteren Rand gesetzt werden.
Kopf und Hals der Schildkröte, die ich einfach unter den Sattel geschraubt habe, können beliebig geformt werden, nur die Bohrung für die Mechanik sollte 30 mm über und 100 mm vor der Sattelplatte sein. Der Hebel, der den Dildo halten soll, muss nach unten durchgebogen sein, um unter dem Sattel durchtauchen zu können, die relevanten Längen sind: 300 mm von Lager zu Lager, 350 mm vom vorderen Lager bis Mitte Dildotisch, 150 mm vom hinteren Lager bis Mitte Dildotisch, liegt der Dildotisch parallel zu einer geraden Kante, ist das vordere Lager 30 mm oberhalb des Tisches. Die Fußlager sind 200 mm über dem Fußboden und 30 mm vor dem bisher 700 mm langen Stativ. Schließlich fehlt noch ein gerader Hebel mit Bohrungen im Abstand von 270 mm.
Nach etwa einem halben Tag Arbeit kann man die Teile provisorisch zusammen bauen (zwischen bewegliche Holzteile legt man eine Unterlegscheibe, um die Reibung zu minimieren). Dann sieht es wie in Abb. 6.54 aus - und funktioniert!
Wollte man daraus jetzt ein schönes Möbel machen, könnte man die Formen mittels Stichsäge kreativ gestalten und die Kanten abrunden. Müsste alles noch spachteln und lackieren und zum Schluß noch die Polster (s. A. 6.15.3) auf 10 mm Sperrholz aufbauen und von unten durch den Sattel verschrauben.
Um den Dildo zu befestigen, könnte dieser durch einen 50 mm Ring gesteckt werden, der mit einem Nylongut mit 2 D-Ringen an einem Ende am Dildotisch befestigt wird (ähnlich Abschnitt 6.20).
Aber das ist der langwierige Teil einer solchen Bastelei und hier soll es ja nur um die Machbarkeitsstudie gehen.
Viel Spaß beim Basteln :-)
